ﻣﮑﺎن ﯾﺎﺑﯽ ﻣﻨﺎﺑﻊ اﻟﮑﺘﺮوﻣﻐﻨﺎﻃﯿﺲ، اﮐﻮﺳﺘﯿﮏ و اﻣﻮاج ارﺗﻌﺎﺷﯽ به ﻮﺳﯿﻠﻪ سیستمهای آراﯾـﻪاي ﭘـﺴﯿﻮ اﺧﯿـﺮاً ﻣﻮﺿـﻮع ﻣـﻮرد ﻋﻼﻗﻪ ﺑﺴﯿﺎري از ﺷﺎﺧﻪﻫﺎ ﻧﻈﯿﺮ ﻧﺠﻮم، ﻋﻠﻮم دﻓﺎﻋﯽ و زﻣﯿﻦ ﺷﻨﺎﺳﯽ ﻗﺮار ﮔﺮﻓﺘﻪ اﺳﺖ. ﺳﻨﺴﻮرﻫﺎي آراﯾﻪ ﻣﻤﮑﻦ اﺳﺖ ﺷـﺎﻣﻞ ﮔﺮوهی از آنتنها، ﻣﯿﮑﺮوﻓﻦﻫﺎ و ﯾﺎ ژﺋﻮﻓﻮنﻫﺎ ﺑﺴﺘﻪ ﺑﻪ ﻧﻮع ﮐﺎرﺑﺮد ﺑﺎﺷﻨﺪ.
ﺑﻪ ﻫﻤﺮاه ﮔﺴﺘﺮش داﻣﻨﻪ و ﻧﻮع ﺗﻬﺪﯾﺪات دﺷﻤﻦ، ﻟﺰوم ﺑﮑﺎرﮔﯿﺮی ﺳﯿﺴﺘمهای ﭘﺪاﻓﻨﺪی ﻣﺘﻨﺎﺳﺐ ﺑﺎ ﺗﻬﺪﯾﺪات ﺑﻮﺟﻮد آﻣﺪه اﻓﺰاﯾﺶ ﻣﯽﯾﺎﺑﺪ. اﻣﺮزه ﺳﯿﺴﺘﻢﻫﺎی رادار و ﺳﻮﻧﺎر در زﻣﯿﻨﻪﻫﺎي ﻣﺨﺘﻠﻒ ﻧﻈﺎﻣﯽ و ﻏﯿﺮ ﻧﻈﺎﻣﯽ ﺑﮑﺎر ﻣﯽروﻧﺪ، و اﻫﻤﯿﺖ آنها در ﻣﺴﺎﺋﻞ ﺣﻔﺎﻇﺘﯽ ﺑﮕﻮﻧﻪای اﺳﺖ ﮐﻪ ﺑﻌﻨﻮان ﺳﯿﺴﺘﻢ ﻫﺎی اﺳﺘﺮاﺗﮋﯾﮏ ﻫﺮ ﮐﺸﻮر ﻣﺤﺴﻮب ﻣﯽ ﺷﻮﻧﺪ.
ﺟﺴﺘﺠﻮ و ردﯾﺎﺑﯽ اﻫﺪاف ﻧﻈﺎﻣﯽ و ﻫﺪاﯾﺖ ﻫﻮاﭘﯿﻤﺎ، ﻣﻮﺷﮏ و … از ﺟﻤﻠﻪ وﻇﺎﯾﻒ اﺻﻠﯽ اﯾﻦ ﺳﯿﺴﺘﻢﻫﺎ در ﻣﮑﺎنﯾﺎﺑﯽ ﻫﺴﺘﻨﺪ. اﺳﺎس ﮐﺎر ﺳﯿﺴﺘﻢﻫﺎي رادار و ﺳﻮﻧﺎر ﻓﻌﺎل ﺑﺮ ﻣﺒﻨﺎي ارﺳﺎل ﺳﯿﮕﻨﺎل، درﯾﺎﻓﺖ ﺳﯿﮕﻨﺎل ﺑﺎزﮔﺸﺘﯽ و ﭘﺮدازش آن ﺟﻬﺖ اﺳﺘﺨﺮاج اﻃﻼﻋﺎت در ﻣﻮرد ﻫﺪف اﺳﺖ.
ﺑﺎ اﻧﺪازهﮔﯿﺮي ﺗﺎﺧﯿﺮ در درﯾﺎﻓﺖ ﻣﻮج، ﻓﺎﺻﻠﻪ را ﺑﺪﺳﺖ ﻣﯽآورد و ﺑﺎ ﺳﻨﺠﺶ ﻣﻘﺪار داﭘﻠﺮ،ﺳﺮﻋﺖ را اﻧﺪازه ﻣﯽﮔﯿﺮد و ﺑﺎ ﭘﺮدازشهای ﭘﯿﺸﺮﻓﺘﻪﺗﺮ ﺷﮑﻞ ﺗﻘﺮﯾﺒﯽ ﻫﺪف را ﻣﻌﯿﻦ ﻣﯽﮐﻨﺪ.
ﺟﻠﻮﮔﯿﺮي از اﻧﻌﮑﺎس اﻣﻮاج رادﯾﻮﯾﯽ در اﻫﺪاف ﻧﻈﺎﻣﯽ اﻣﺮوزه ﺟﺰو ﻻﯾﻨﻔﮏ ﺑﺤﺚ رادار در ﻣﮑﺎنﯾﺎﺑﯽ اﺳﺖ. ﻫﻮاﭘﯿﻤﺎﻫﺎ ﯾﺎ ﮐﺸﺘﯽﻫﺎي ﺿﺪ رادار ﮐﻪ ﻣﻌﻤﻮﻻ ﺑﺎ ﺟﺬب اﻣﻮاج رادﯾﻮﯾﯽ، ﭘﮋواك ﺧﻮد را ﺑﻪ ﻣﯿﺰان ﻗﺎﺑﻞ ﺗﻮﺟﻬﯽ ﮐﺎﻫﺶ ﻣﯽدﻫﻨﺪ و ﺑﻪ اﯾﻦ ﺗﺮﺗﯿﺐ ﺑﺮد رادار را ﮐﻢ ﻣﯽﮐﻨﻨﺪ، از ﺟﻤﻠﻪ ﻣﺒﺎﺣﺚ زﻧﺪه رادار ﻫﺴﺘﻨﺪ.
ﮐﺸﻒ اﯾﻦ ﻧﻮع اﻫﺪاف، ﮐﻪ ﻋﻤﻮﻣﺎً ﺑﺎ اﺳﺘﻔﺎده از ﻃﻮل ﻣﻮجهای ﺑﻠﻨﺪﺗﺮ ﺻﻮرت ﻣﯽﮔﯿﺮد ﺟﺎن ﺗﺎزهاي ﺑﻪ رادارﻫﺎي VHF و UHF در ﺳﺎلهای اﺧﯿﺮ ﺑﺨﺸﯿﺪه اﺳﺖ.
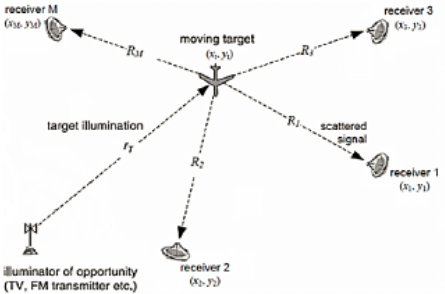
ﺑﺮاي ﻣﺼﻮن ﻣﺎﻧﺪن رادار، اﺳﺘﻔﺎده از رادارﻫﺎي ﻏﯿﺮﻓﻌﺎل ﺑﻪ ﺗﺪرﯾﺞ اﻫﻤﯿﺖ ﻓﺰاﯾﻨﺪهاي ﯾﺎﻓﺘﻪ اﺳﺖ. در اﯾﻦ رادارﻫﺎ ﮔﺮﭼﻪ اﺻﻮل رادار ﺣﺎﮐﻢ اﺳﺖ وﻟﯽ ﻓﺮﺳﺘﻨﺪه رادار ﺣﺬف ﻣﯽﺷﻮد و ﺳﻌﯽ ﻣﯽﮔﺮدد از اﻣﻮاﺟﯽ ﻧﻈﯿﺮ اﻣﻮاج ﺳﯿﺴﺘمهای ﻣﻮﺑﺎﯾﻞ، اﻣﻮاج TV، اﻣﻮاج رادﯾﻮ FM وﮔﺎه AM ﮐﻪ ﺑﻄﻮر ﻣﻌﻤﻮل در ﻣﺤﯿﻂ وﺟﻮد دارﻧﺪ اﺳﺘﻔﺎده ﺷﻮد.
در آن واﺣﺪ ﺑﺎ درﯾﺎﻓﺖ اﻣﻮاج ﻣﺴﺘﻘﯿﻢ اﯾﻦ اﯾﺴﺘﮕﺎههای زﻣﯿﻨﯽ و اﻧﻌﮑﺎسﻫﺎي آنها از اﻫﺪاف و ﭘﺮدازش ﻣﻨﺎﺳﺐ و اﻏﻠﺐ ﭘﯿﭽﯿﺪه، ﻣﻮﻗﻌﯿﺖ و ﺳﺮﻋﺖ اﻫﺪاف را اﺳﺘﺨﺮاج ﻣﯽﮐﻨﺪ. ﺣﺬف ﻓﺮﺳﺘﻨﺪه راداري،ﮔﯿﺮﻧﺪه رادار را از ﭼﺸﻢ دﺷﻤﻦ ﭘﻨﻬﺎن ﻣﯽﮐﻨﺪ. در ﺳﯿﺴﺘﻢﻫﺎي ﻏﯿﺮﻓﻌﺎل اﮔﺮﭼﻪ ﻣﺮﺣﻠﻪ ارﺳﺎل ﺳﯿﮕﻨﺎل ﺣﺬف ﻣﯽﮔﺮدد وﻟﯽ در ﻗﺒﺎل آن ﺑﺮ ﻣﯿﺰان ﭘﯿﭽﯿﺪﮔﯽ ﭘﺮدازش ﺑﺮ روي ﺳﯿﮕﻨﺎلهای ﺑﺎزﮔﺸﺘﯽ اﻓﺰوده ﻣﯽﺷﻮد.
اوﻟﯿﻦ ﻻﯾﻪ در ﯾﮏ ﺳﯿﺴﺘﻢ ﭘﺪاﻓﻨﺪي رادارﻫﺎي ﻣﺮاﻗﺒﺖ ﺑﺮد ﺑﻠﻨﺪ اﯾﻦ ﺷﺒﮑﻪ ﯾﺎ رادارﻫﺎي ﻣﺎدر آن ﻫﺴﺘﻨﺪ. وﻇﯿﻔﻪ اﺻﻠﯽ اﯾﻦ رادارﻫﺎ آﺷﮑﺎرﺳﺎزي و اﻋﻼم ﻣﻮﻗﻌﯿﺖ اﻫﺪاف ﻫﻮاﯾﯽ ﻗﺒﻞ از وارد ﺷﺪن اﻫﺪاف ﺑﻪ ﺣﻮزه دﯾﺪ سیستمهای ﻫﺪاﯾﺖ آﺗﺶ اﺳﺖ.
اﯾﻦ رادارﻫﺎ ﺑﺪﻟﯿﻞ داﺷﺘﻦ ﺑﺮد ﺑﻠﻨﺪ داراي ﺗﻮان ﺗﺸﻌﺸﻌﯽ ﺑﺴﯿﺎر ﺑﺎﻻﯾﯽ ﺑﻮده و ﺑﻨﺎﺑﺮاﯾﻦ ﺗﻘﺮﯾﺒﺎً ﺑﻪ ﺳﻬﻮﻟﺖ ﺗﻮﺳﻂ سیستمهای ﻣﮑﺎن ﯾﺎﺑﯽ ﻗﺎﺑﻞ ﺷﻨﺎﺳﺎﯾﯽ و ﻣﮑﺎن ﯾﺎﺑﯽ ﻫﺴﺘﻨﺪ.
از ﺳﻮي دﯾﮕﺮ اﯾﻦ رادارﻫﺎ،در ﻣﻌﺮض ﺗﻬﺪﯾﺪي ﺑﺴﯿﺎر ﺟﺪي از ﺳﻮي ﻣﻮشکهای ﺿﺪ ﺗﺸﻌﺸﻊ ﯾﺎ ﻣﻮﺷﮑﻬﺎيARM ﻣﯽﺑﺎﺷﻨﺪ. اﯾﻦ ﻣﻮشکها ﺑﺎ اﺳﺘﻔﺎده از ﺳﯿﺴﺘﻢ ردﮔﯿﺮ ﺗﺸﻌﺸﻌﺎت راداری میتوانند ﺑﺮﻋﻠﯿﻪ اﻧﻮاع رادارﻫﺎ اﻋﻢ از رادار ﻣﺮاﻗﺒﺖ ﯾﺎ ردﮔﯿﺮ ﻣﻮرد اﺳﺘﻔﺎده ﻗﺮار ﮔﯿﺮد.
اﻧﻮاع ﺟﺪﯾﺪ اﯾﻦ ﻣﻮﺷکها ﺗﺤﺖ ﻋﻨﻮان HARM داراي ﺳﺮﻋﺖ ودﻗﺖ ﺑﺴﯿﺎر ﺑﺎﻻﯾﯽ ﻫﺴﺘﻨﺪ. ﺗﺠﺮﺑﯿﺎت ﺣﺎﺻﻞ از ﺟﻨگهای اﺧﯿﺮ ﻧﺸﺎن داده اﺳﺖ ﮐﻪ اﯾﻦ ﺗﻬﺪﯾﺪات ﺑﺴﯿﺎر ﺟﺪي ﺑﻮده و ﻣﯽﺗﻮاﻧﺪ ﻣﻮﺟﺐ اﻧﻬﺪام ﺑﺴﯿﺎري از ﺳﺎیتهای ﺷﺒﮑﻪ ﭘﺪاﻓﻨﺪي ﮔﺮدد. ﻣﺴﺌﻠﻪ EMC ﻣﻌﻀﻞ دﯾﮕﺮي اﺳﺖ ﮐﻪ رادارﻫﺎ ﺑﺎ آن مواجه هستند.
ﻗﺒﻞ از اﻧﺠﺎم ﻫﺮﮔﻮﻧﻪ ﺣﻤﻠﻪ اﻟﮑﺘﺮوﻧﯿﮑﯽ ﻻزم اﺳﺖ ﮐﻪ ﻣﻮﻗﻌﯿﺖ رادار و ﯾﺎ ﺣﺪاﻗﻞ ﺳﻤﺖ آن ﺗﻮﺳﻂ ﺳﯿﺴﺘمهای EMC اﺳﺘﺨﺮاج ﺷﻮد. ﭘﺲ از اﯾﻦ ﮐﺎر میتوان ﺳﯿﺴﺘﻢ رادار را ﮐﺎﻣﻼً ﻣﺨﺘﻞ ﮐﺮد و ﯾﺎ ﺑﻪ ﻋﺒﺎرﺗﯽ ﻧﻮﻋﯽ اﻧﻬﺪام ﻣﻼﯾﻢ روي رادار اﻧﺠﺎم داد.
رادارﻫﺎي ﻏﯿﺮﻓﻌﺎل ازﻓﺮﺳﺘﻨﺪه ﺑﻬﺮه ﻧﻤﯽﺑﺮﻧﺪ. ﺑﻨﺎﺑﺮاﯾﻦ ﻫﯿﭽﮕﻮﻧﻪ ﺗﺸﻌﺸﻌﯽ ﻧﺪاﺷﺘﻪ و ﺑﻪ رادارﻫﺎي ﺳﺎﮐﺖ ﻣﺸﻬﻮر ﻣﯽﺑﺎﺷﻨﺪ. اﺳﺘﻔﺎده از رادارﻫﺎي ﻏﯿﺮ ﻓﻌﺎل جهت ﻣﮑﺎنﯾﺎﺑﯽ ﻣﺒﺘﻨﯽ ﺑﺮ دو اﺳﺘﺮاﺗﮋي ﻣﺨﺘﻠﻒ اﺳﺖ.
اول آنکه رادار ﻏﯿﺮ ﻓﻌﺎل ﺑﻌﻨﻮان ﯾﮏ ﺳﯿﺴﺘﻢ رادار اﻫﺪاف را ﻣﻮرد آﺷﮑﺎرﺳﺎزي ﻗﺮار داده و ﺷﺒﯿﻪ ﯾﮏ ﺳﯿﺴﺘﻢ رادار ﻓﻌﺎل ﻣﺄﻣﻮرﯾﺖ آﺷﮑﺎرﺳﺎزي و ﻓﺎﺻﻠﻪﯾﺎﺑﯽ ﻫﺪف را اﻧﺠﺎم دﻫﺪ.
دوم آنکه ﺳﯿﺴﺘمهای ﻣﺮاﻗﺒﺖ ﻏﯿﺮﻓﻌﺎل در واﻗﻊ ﺳﺒﺐ ﺑﻮﺟﻮد آﻣﺪن ﻣﻨﺎﻃﻖ ﻣﺮاﻗﺒﺖ ﻧﺎﻣﻌﻠﻮم ﻣﯽﺷﻮﻧﺪ. ﺑﻪ ﻋﺒﺎرﺗﯽ ﻫﺪف نمیتواند ﺗﺸﺨﯿﺺ دﻫﺪ ﮐﻪ آﯾﺎ ﺗﻮﺳﻂ ﯾﮏ ﺳﯿﺴﺘﻢ رادار در ﺣﺎل ﻣﺸﺎﻫﺪه اﺳﺖ ﯾﺎ ﺧﯿﺮ. اﯾﻦ در ﺣﺎﻟﯽ اﺳﺖ ﮐﻪ ﻣﻌﻤﻮﻻً ﻋﻤﻠﯿﺎت ﯾﮏ ﻫﻮاﭘﯿﻤﺎ ﺑﺎ اﻃﻼﻋﺎت ﮐﺎﻣﻠﯽ ازﺳﯿﺴﺘمهای ﭘﺪاﻓﻨﺪي ﻣﻨﻄﻘﻪ اﻧﺠﺎم ﻣﯽﭘﺬﯾﺮد ﮐﻪ اﯾﻦ اﻃﻼﻋﺎت ﺟﻤﻊ آوري وﺗﺤﻠﯿﻞ ﻣﯽﺷﻮﻧﺪ وﻟﯽ ﺑﺎ ﺑﮑﺎرﮔﯿﺮي رادار ﻏﯿﺮﻓﻌﺎل اﯾﻦ ﻣﻮﺿﻮع ﺑﺎ اﺧﺘﻼل ﻣﻮاﺟﻪ ﺧﻮاﻫﺪ ﺷﺪ.
ﺳﯿﺴﺘمهای ﺷﻨﻮد راداري ﺑﻪ دو دﺳﺘﻪ ﺑﺰرگ، ﺳﯿﺴﺘمهایELINT و ﺳﯿﺴﺘمهای ESM ﺗﻘﺴﯿﻢ ﻣﯽﺷﻮﻧﺪ. ﻣﺄﻣﻮرﯾﺖ ﮐﺴﺐ اﻃﻼﻋﺎت راداري ﯾﮏ ﻣﻨﻄﻘﻪ ﺑﺴﺘﻪ ﺑﻪ اوﻟﻮﯾﺖ دﻗﺖ ﯾﺎ ﺳﺮﻋﺖ ﺑﺮ ﻋﻬﺪه ﯾﮑﯽ از ﺳﯿﺴﺘمهای ESM ﯾﺎ ELINT واﮔﺬار ﻣﯽﺷﻮد. ﺑﻄﻮر ﮐﻠﯽ ﺳﯿﺴﺘﻢﻫﺎي ESM ﺑﺎﯾﺪ درزﻣﺎن واﻗﻌﯽ ﮐﺎر ﮐﻨﻨﺪ. ﯾﻌﻨﯽ ﺳﺮﯾﻌﺎ وﺿﻌﯿﺖ ﻣﻮﺟﻮد را ﺗﻔﺴﯿﺮ ﮐﺮده، ﺗﻬﺪﯾﺪﻫﺎ را ﻣﺸﺨﺺ ﻧﻤﻮده و ﻓﺮاﻣﯿﻦ را ﺑﻪ ﻣﺮاﮐﺰ ﻣﺮﺑﻮﻃﻪ ﺻﺎدر ﮐﻨﻨﺪ.
ﯾﮏ ﮔﯿﺮﻧﺪه ESM در ﻣﮑﺎن ﯾﺎﺑﯽ ﺑﺼﻮرﺗﯽ ﻃﺮاﺣﯽ ﻣﯽﺷﻮد ﮐﻪ ﭘﺎراﻣﺘﺮﻫﺎي ﻣﻮﻧﻮﭘﺎﻟﺲ ﻗﺎﺑﻞ اﻧﺪازه ﮔﯿﺮي، ﻧﻈﯿﺮ زاوﯾﻪ ورود ﭘﺎﻟﺲ، ﻓﺮﮐﺎﻧﺲ رادﯾﻮﯾﯽ ﭘﺎﻟﺲ، ﭘﻬﻨﺎي ﭘﺎﻟﺲ،داﻣﻨه ﭘﺎﻟﺲ و زﻣﺎن ورود ﭘﺎﻟﺲ را از ﺳﯿﮕﻨﺎلهای راداري ﭘﺎﻟﺲ دوﭘﻠﺮي ﯾﺎ CW اﺳﺘﺨﺮاج ﻧﻤﺎﯾﺪ. وﻟﯽ وﻇﯿﻔهی اﺳﺎﺳﯽ ﺳﯿﺴﺘمهای ELINT ﺟﻤﻊ آوري اﻃﻼﻋﺎت ﻣﯽﺑﺎﺷﺪ. ﻣﻌﻤﻮﻻً به هنگام ﺻﻠﺢ و در زﻣﺎﻧﻬﺎي ﻃﻮﻻﻧﯽ ﺑﻪ ﺗﺠﺰﯾﻪ و ﺗﺤﻠﯿﻞ آراﯾﺶ ﺟﻨﮓ اﻟﮑﺘﺮوﻧﯿﮑﯽ دﺷﻤﻦ ﻣﯽﭘﺮدازد و ﺑﺎﻧﮏ اﻃﻼﻋﺎت راداري ﻻزم را ﺑﺮاي ﮐﺎر ﻣﻄﻤﺌﻦ ﺳﯿﺴﺘمهای ESM ﻓﺮاﻫﻢ ﻣﯽﻧﻤﺎﯾﺪ.
ﺑﻪ ﻋﺒﺎرﺗﯽ، ﺳﯿﺴﺘمهایELINT وﻇﺎﯾﻒ ﮐﺸﻒ ﺳﯿﮕﻨﺎلهای راداري، آﻧﺎﻟﯿﺰ ﺳﯿﮕﻨﺎلهای درﯾﺎﻓﺘﯽ به منظور اﻧﺪازهﮔﯿﺮي ﭘﺎراﻣﺘﺮﻫﺎي ﺳﯿﮕﻨﺎل و دﺳﺘﻪﺑﻨﺪي آنها و ﺷﻨﺎﺳﺎﯾﯽ ﻧﻮع ﻓﺮﺳﺘﻨﺪه را ﺑﺮﻋﻬﺪه دارد.
اﻫﺪاف اﺳﺘﯿﻠﺚ ﺑﻪ ﮔﻮﻧﻪ اي ﻃﺮاﺣﯽ ﻣﯽﺷﻮﻧﺪ ﮐﻪ در ﺟﻬﺎت ﺧﺎﺻﯽ داراي ﺧﺎﺻﯿﺖ ﻧﺎﻣﺮﺋﯽ ﺑﻮدن ﻫﺴﺘﻨﺪ. ﺑﻪ ﻋﺒﺎرﺗﯽ در ﯾﮏ زاوﯾﻪ ﺧﺎص در ﺳﻄﺢ زﯾﺮﯾﻦ ﻫﻮاﭘﯿﻤﺎ ﻧﺎﻣﺮﺋﯽ ﺑﻮدن ﺑﻬﯿﻨﻪ ﻣﯽﺷﻮد. ﭼﻨﺎنچه از زواﯾﺎﯾﯽ ﻏﯿﺮ از زاوﯾﻪ ﻧﺎﻣﺮﺋﯽ، رادار از ﻫﺪف اﮐﻮ ﺑﮕﯿﺮد ﻣﺴﺌﻠﻪ ﻧﺎﻣﺮﺋﯽ ﺑﻮدن ﻣﻨﺘﻔﯽ اﺳﺖ.
از آنجا ﮐﻪ رادار ﻏﯿﺮ ﻓﻌﺎل دوﭘﺎﯾﻪ داراي ﻫﻨﺪﺳﻪ دوﭘﺎﯾﻪ ﻣﯽﺑﺎﺷﺪ، ﺑﺎزﺗﺎبهای ﺑﺮﮔﺸﺘﯽ را از ﻫﺪف درﯾﺎﻓﺖ ﻧﻤﯽﻧﻤﺎﯾﺪ ﺑﻠﮑﻪ ﺑﺎزﺗﺎبهای ﻣﺴﺘﻘﯿﻢ را از ﺟﻬﺘﯽ ﻣﺘﻔﺎوت ﺑﺎ ﺟﻬﺖ ﺗﺎﺑﺶ ﻣﻮج درﯾﺎﻓﺖ ﻣﯽﻧﻤﺎﯾﺪ. و ﻣﯽﺗﻮاﻧﺪ از اﻫﺪاف اﺳﺘﯿﻠﺚ ﺳﻄﺢ ﻣﻘﻄﻊ راداري ﺑﺰرگ ﺑﮕﯿﺮد، اﯾﻦ ﻣﺴﺎﻟﻪ، آﺷﮑﺎرﺳﺎزي اﻫﺪاف اﺳﺘﯿﻠﺚ را ﺗﻮﺳﻂ رادارﻫﺎي دوﭘﺎﯾﻪ اﻣﮑﺎن ﭘﺬﯾﺮ ﻣﯽﺳﺎزد.
ﺗﺎرﯾﺨﭽﻪی اﺳﺘﻔﺎده از رادار ﻏﯿﺮﻓﻌﺎل ﺑﺎ ﻫﺪف آشکارسازی اﻫﺪاف ﻫﻮاﯾﯽ و ﻣﮑﺎنﯾﺎﺑﯽ ﺑﻪ ﺳﺎل ١٩٣۵باز میگردد. زمانی ﮐﻪ راﺑﺮت واﺗﺴﻮن‐وات یک آزﻣﺎﯾﺶ ﺑﺎی استاتیک را در ﺷﻬﺮ دوﻧﺘﺮی ﺑﺎ اﺳﺘﻔﺎده از ﻣﻨﺒﻊ ﻓﺮﺳﺘﻨﺪهی ﻣﻮج ﮐﻮﺗﺎه (ﻃﻮل ﻣﻮج ۴٩ ﻣﺘﺮ) اﻣﭙﺎﯾﺮ ﺑﯽ ﺑﯽ سی اﻧﺠﺎم داد. ﺗﺎ ﺑﺘﻮاﻧﺪ ﻫﻮاﭘﯿﻤﺎی ﺑﻤﺐ اﻓﮑﻦ ﻫﯿﻔﻮرد را در ﻓﺎﺻﻠﻪ ی ﮐﻢ آشکارسازی ﻧﻤﺎﯾﺪ.
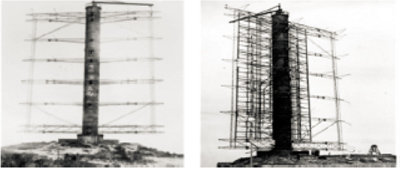
راﺑﺮت واﺗﺴﻮن‐وات و همکارانش ﮔﯿﺮﻧﺪه رادﯾﻮﯾﯽ ﺧﻮد را در ﻓﺮﮐﺎﻧﺲ ﻓﺮﺳﺘﻨﺪه ﺑﯽ ﺑﯽ سی ﺗﻨﻈﯿﻢ ﻧﻤﻮدﻧﺪ. زمانی ﮐﻪ ﺑﻤﺐ اﻓﮑﻦ ﻫﯿﻔﻮرد از ﺑﺎﻻی ﺳﺮﺷﺎن ﻋﺒﻮر میکرد. سیگنال ﻓﺮﺳﺘﻨﺪه درﯾﺎﻓﺖ ﺷﺪ و در اسیلوسکوپ ﻣﺸﺎﻫﺪه ﺷﺪ. در ﺳﺎل،١٩۴٣ ﮔﯿﺮﻧﺪهﻫﺎی آلمانی ﮐﻼﯾﻦ ﻫﺎﯾﺪﻟﺒﺮگ، از اﻧﺘﺸﺎر اﻣﻮاج ﻣﺮﺑﻮط ﺑﻪ رادارﻫﺎی ﺑﺮﯾﺘﺎﻧﯿﺎ ﺑﻬﺮه میبردند. ﺗﺎ ﺑﺘﻮاﻧﻨﺪ ﻫﻮاﭘﯿﻤﺎﻫﺎی ﻣﺘﺠﺎوز را آشکار ﻧﻤﺎﯾﻨﺪ.
اﯾﻦ رادارﻫﺎ، اوﻟﯿﻦ رادارﻫﺎی ﻏﯿﺮﻓﻌﺎل عملیاتی جهت ﻣﮑﺎن ﯾﺎﺑﯽ ﺑﻮدﻧﺪ. ﻣﺰﯾﺖ اصلی ﮔﯿﺮﻧﺪهﻫﺎی ﻏﯿﺮﻓﻌﺎل در ﻣﮑﺎنﯾﺎﺑﯽ ﮐﻼﯾﻦ ﻫﺎﯾﺪﻟﺒﺮگ ﻣﻘﺎوﻣﺖ در ﺑﺮاﺑﺮ اﺧﻼلﮔﺮﻫﺎی ﺑﺮﯾﺘﺎﻧﯿﺎ ﺑﻮد. یک نمایشی از دو ﻧﻮع آﻧﺘﻦ ﮐﻼﯾﻦ ﻫﺎﯾﺪﻟﺒﺮگ در شکل 2 آورده ﺷﺪه اﺳﺖ. در ﺳﺎل،١٩٣۶ ﺑﺎ اﺧﺘﺮاع دوﺳﻮﯾﻪﺳﺎز ﮐﻪ ﻣﻮﺟﺐ ﭘﯿﺸﺮﻓﺖ ﺳﺮﯾﻊ رادارﻫﺎی ﺗﮏ ﭘﺎﯾﻪ ﺷﺪ.
رادارﻫﺎی ﻏﯿﺮﻓﻌﺎل ﺑﻪ ﻃﻮر موقتی ﮐﻨﺎر ﮔﺬاﺷﺘﻪ ﺷﺪﻧﺪ. ﭘﯿﺸﺮﻓﺖﻫﺎی راداری ﺑﻪ ﺳﻤﺖ رادارﻫﺎی ﺑﺎ اﺣﺘﻤﺎل رهگیری ﭘﺎﺋﯿﻦ (LPI) ﮐﺸﯿﺪه ﺷﺪ و بررسیﻫﺎی ﻣﺮﺑﻮط ﺑﻪ اﻗﺪاﻣﺎت ﻣﺘﻘﺎﺑﻞ ﺿﺪ الکترونیک در ﺟﻬﺖ ﻣﻘﺎﺑﻠﻪ ﺑﺎ اﺧﻼل ﮔﺮﻫﺎ ﺻﻮرت ﮔﺮﻓﺖ.
بررسیﻫﺎی ﻣﺮﺑﻮط ﺑﻪ اﻗﺪاﻣﺎت ﻣﺘﻘﺎﺑﻞ صدالکترونیک در ﺟﻬﺖ ﻣﻘﺎﺑﻠﻪ ﺑﺎ اﺧﻼلﮔﺮﻫﺎ ﺻﻮرت ﮔﺮﻓﺖ. در ﺳﺎل،١٩۵٠ هنگامی ﮐﻪ ﺑﻪ برخی از ویژگیﻫﺎی ﺟﺎﻟﺐ ﺗﻮجه اﻧﺮژی رادارﻫﺎی ﭘﺮاﮐﻨﺪه ﺳﺎز ﭘﯽ ﺑﺮده ﺷﺪ ﺳﯿﺴﺘﻢﻫﺎی دوﭘﺎﯾﻪ ﻣﺠﺪدا ﻣﻮرد ﺗﻮﺟﻪ ﻗﺮار ﮔﺮﻓﺘﻨﺪ.
اوﻟﯿﻦ اﺳﺘﻔﺎده از اﺻﻄﻼح دوﭘﺎﯾﻪ ﺗﻮﺳﻂ سایگل در ﺳﺎل ١٩۵۵ در گزارشی ﮐﻪ درﺑﺎره ﺑﯿﺎن ﻫﻤﯿﻦ ویژگیﻫﺎ ﺑﻮد ﻣﻄﺮح ﮔﺮدﯾﺪ. آزﻣﺎﯾﺸﺎت اﻧﺠﺎم ﺷﺪه در اﯾﺎﻻت ﻣﺘﺤﺪه ﻣﻨﺠﺮ ﺑﻪ ﺗﻮﺳﻌﻪ ﺳﯿﺴﺘﻢﻫﺎی دوﭘﺎﯾﻪ ﺷﺪ، ﺑﻪ ﻧﺤﻮی ﮐﻪ رادارAN/FPS-23 fluttar در ﺧﻂ ﻫﺸﺪار از راه دور (DEW) (ﮐﻪ سیستمی ﻣﺘﻌﻠﻖ ﺑﻪ اﯾﺴﺘﮕﺎه ﻫﺎی راداری اﺳﺖ) در آمریکای شمالی طراحی ﺷﺪ.
اﯾﻦ رادار یک رادار ﺣﺼﺎر دوﭘﺎﯾﻪ ﺑﺎ ﭘﺮﺗﻮ ﺛﺎﺑﺖ ﻣﻮج ﭘﯿﻮﺳﺘﻪ ﺑﻮد ﮐﻪ در ﺳﺎل ١٩۵۵ ﺗﻮﺳﻌﻪ ﯾﺎﻓﺖ ﺗﺎ ﺑﻪ کمک ﺑﻤﺐ اﻓﮑﻦ ﻫﺎی ﮐﻮﺗﺎه ﺑﺮد ﻧﻔﻮذ ﻣﺘﻌﻠﻖ ﺑﻪ ﺧﻂDEW را آشکار ﻧﻤﺎﯾﺪ. رادارﻫﺎی ﻓﻠﻮﺗﺎر ﺑﺮای ﺑﺮ ﻃﺮف ﮐﺮدن مشکلات ارﺗﻔﺎع ﭘﺴﺖ ﻣﻮﺟﻮد ﺑﯿﻦ رادارﻫﺎی ﻣﺮاﻗﺒﺖ ﺗﮏ ﭘﺎﯾﻪ ﻃﺮاحی ﺷﺪه ﺑﻮدﻧﺪ. اﯾﻦ رادارﻫﺎ ﺑﻪ ﻣﺪت ۵ ﺳﺎل در ﺧﻂ DEW در ﺣﺎل ﺗﻮﺳﻌﻪ و ﺑﻬﺒﻮد ﮐﺎراﯾﯽ ﺑﻮدﻧﺪ.
در دﻫﻪی،١٩٨٠ ﭼﻨﺪﯾﻦ ﮐﺸﻮر اروﭘﺎﯾﯽ در زﻣﯿﻨﻪی مکان یابی ﻏﯿﺮﻓﻌﺎل ﻣﺎﻧﻨﺪ ردﮔﯿﺮی ﻓﺮﺳﺘﻨﺪه ﻏﯿﺮﻓﻌﺎل و مکانیابی اﺧﻼلﮔﺮ ﻏﯿﺮﻓﻌﺎل، ﺗﻮﺳﻌﻪ ﯾﺎﻓﺘﻨﺪ.
ﻫﻢﭼﻨﯿﻦ مکان یابی ﻏﯿﺮﻓﻌﺎل ﺷﺎﻣﻞ یک ﮔﯿﺮﻧﺪه ی رادار ﻏﯿﺮﻓﻌﺎل میباشد ﮐﻪ ﺑﺎ اﺳﺘﻔﺎده از اﻣﻮاج ﻣﻨﺘﺸﺮ ﺷﺪه ﺗﻮﺳﻂ یک رادار ﻣﺮاﻗﺒﺖ ﻓﺮودﮔﺎه ﻋﻤﻞ میﮐﺮد. در دﻫﻪ ١٩٩٠ اﺣﯿﺎی ﻣﺠﺪد رادار ﻧﻬﺎن ﻏﯿﺮﻓﻌﺎل (PCR) رخ داد. زمانی ﮐﻪ ﮔﺮوه ﺗﺤﻘﯿﻘﺎتی دﻓﺎعی ﻧﺎﺗﻮ ﻣﻄﺎﻟﻌﺎتی را ﺑﺮ روی رادارﻫﺎی ﻧﻮﯾﺰی و ﻏﯿﺮﻓﻌﺎل ﺑﻪ راه اﻧﺪاﺧﺘﻨﺪ ﮐﻪ ﺣﺎﺻﻞ آن ﺑﺮﮔﺰاری یک ﺳﻤﭙﻮزﯾﻮم ﺑﻮد.
ﻓﺮﺳﺘﻨﺪهﻫﺎی ﭘﺨﺶ ﺑﻌﻨﻮان ﻣﻨﺎﺑﻊ ﺑﺎﻟﻘﻮه ﺑﺮای رادار PCR جهت ﻣﮑﺎن ﯾﺎﺑﯽ ﺷﻨﺎﺧﺘﻪ ﺷﺪﻧﺪ. اﻧﮕﯿﺰهی ﺟﺪﯾﺪ اﺳﺘﻔﺎده از رادار ﻏﯿﺮﻓﻌﺎل ﻋﻼوه ﺑﺮ وﯾﮋگی ﻧﻬﺎن ﮐﺎری آن، ﻗﺎﺑﻠﯿﺖ ذاتی ﺿﺪ‐رادارﮔﺮﯾﺰی آن ﺑﻮد. از آنﺟﺎﯾﯽ ﮐﻪ ﺗﮑﻨﻮﻟﻮژی رادارﮔﺮﯾﺰی ﺑﺎ ﻫﺪف ﮐﺎﻫﺶ RCS ﻫﻮاﭘﯿﻤﺎ در ﺑﺎﻧﺪ فرکانسی L ﺗﺎ X ﻋﻤﻞ میﮐﺮدﻧﺪ. ﻫﻨﺪﺳﻪی رادارﻫﺎی ﻏﯿﺮﻓﻌﺎل دو ﯾﺎ ﭼﻨﺪﭘﺎﯾﻪ و ﻣﻨﺎﺑﻊVHF/UHF، ﻏﺎﻟﺐ آن ﻫﺎ ﺗﻮاﻧﺴﺘﻨﺪ ﺑﺎ ﻣﻮﻓﻘﯿﺖ ﺑﺎ رادارﮔﺮﯾﺰی ﻣﻘﺎﺑﻠﻪ ﮐﻨﻨد.
در ﺳﺎل٢٠٠١ ﻧﻤﺎیشی از آشکارﺳﺎزی اﻫﺪاف رادار ﻏﯿﺮﻓﻌﺎل در ﻣﮑﺎن ﯾﺎﺑﯽ ﺑﺎ اﺳﺘﻔﺎده از ﻣﻨﺎﺑﻊ رادار ﻣﺮاﻗﺒﺖ VHF‐P18 از ﻧﻮع روسی ﺗﺤﺖ ﻧﺎم PARADE ﺗﻮﺳﻂ ﭘﮋوهشکده FGAN-FHR و ﺑﺎ ﻣﺸﺎرﮐﺖ آژاﻧﺲ ﺗﺤﻘﯿﻘﺎتی ﻣﺠﺎرﺳﺘﺎن اﻧﺠﺎم ﺷﺪ.
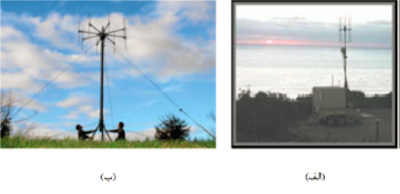
اوﻟﯿﻦ ﻧﻤﻮﻧﻪ ی ﺗﺠﺎری رادار PCR ﮐﻪ ﺑﺎ اﺳﺘﻔﺎده از اﻧﺘﺸﺎر ﭘﺨﺶ رادﯾﻮی FM ﻋﻤﻞ میﮐﺮد ﺗﻮﺳﻂ ﻻﮐﻬﯿﺪ‐ﻣﺎرﺗﯿﻦ ﺗﻮﺳﻌﻪ داده ﺷﺪ و ﺑﻌﻨﻮان ﻧﮕﻬﺒﺎن ﺧﺎﻣﻮش از آن ﯾﺎد ﺷﺪه است(شکل3الف). ﻋﻼوه ﺑﺮ آن، در ﻓﺮاﻧﺴﻪ ﺗﻮﺳﻂ ﺻﻨﻌﺖ ﺗﺎﻟﺲ یک ﺳﯿﺴﺘﻢ دیگر ﺗﻮﺳﻌﻪ ﯾﺎﻓﺖ(شکل3ب).
از اواﺧﺮ دﻫﻪ ی،١٩٩٠ﺑﺎ ﻇﻬﻮر سیگنالﻫﺎی ﭘﺨﺶ دﯾﺠﯿﺘﺎل و راهاﻧﺪازی شبکه ﻫﺎی ﭘﺨﺶ دﯾﺠﯿﺘﺎل (ﭘﺨﺶ ﮔﺮوهی رادﯾﻮیی دﯾﺠﯿﺘﺎل(DAB) و ﭘﺨﺶ وﯾﺪﯾﻮﯾﯽ دﯾﺠﯿﺘﺎل ﺑﻪ ﺻﻮرت زمینی DVB-T) در اروﭘﺎی ﻣﺮﮐﺰی، ﺑﻬﺮهﮔﯿﺮی از اﯾﻦ سیگنالﻫﺎ ﺑﻌﻨﻮان ﻣﻨﺎﺑﻊ اﻗﺘﻀﺎﯾﯽ ﺑﺮای رادارﻫﺎی PCR ﺗﻮﺳﻌﻪ ﯾﺎﻓﺖ.
ﺳﯿﺴﺘﻢ ﮐﻮرا ﮐﻪ ﺗﻮﺳﻂ ﭘﮋوهشکده FGAN-FHR ﺗﻮﺳﻌﻪ ﯾﺎﻓﺖ، اوﻟﯿﻦ ﺳﯿﺴﺘﻢ PCR ﺑﻮد ﮐﻪ وﻇﯿﻔﻪ ی آشکارسازی اﻫﺪاف ﻫﻮاﯾﯽ و درﯾﺎﯾﯽ را داﺷﺖ.








